| PHANTOM 4 PRO V2.0评测:飞行、技巧以及总结 | 您所在的位置:网站首页 › phantom4 rtk用哪个app › PHANTOM 4 PRO V2.0评测:飞行、技巧以及总结 |
PHANTOM 4 PRO V2.0评测:飞行、技巧以及总结
|
初启动和飞行时的噪声表现(对比 Mavic Pro)
静音桨其实就有两个好处,第一就是减少飞行器对他人的噪声干扰,讲真若是一直悬停在你旁边,就像身处塞车的高速公路,我曾经就路人投诉过这个问题。第二是降低飞行器对他人的吸引力,有一些吃瓜群众真的是听到声音才拜访的,在你身旁不断询问,还要指手画脚的,确实会干扰到航拍。
▲内八初启动,会处于低转速状态,噪声相对要小很多,Mavic Pro在近距离实测为71.4 dB。
▲搭配静音桨的PHANTOM 4 PRO+ V2.0,近距离实测为61.9 dB,足足降低了10 dB,就相当于有人在你耳边大声和小声说话的区别。
▲大概离分贝仪1到2米的距离,Mavic Pro实测噪声为83.6 dB,这水平大概持平于Phatom大部分机型。
▲同样地,PHANTOM 4 PRO+ V2.0实测为79 dB,确实是降低了3到4dB,和官方宣传的数据相近,要说实际作用还是有的,这个位数的进步已经很难得了,毕竟人类对科学的瓶颈摆在面前。 浅谈对智能飞行模式的看法
传感器、计算内核的升级给我们带来了FlightAutonomy系统,同时衍生出了智能飞行模式,对于一些刚上手或者有特殊拍摄需求的朋友来说,确实能带来便利。先说说本人用最多的几种模式:智能跟随、三脚架和返航锁定。
其余像轨迹飞行、指点飞行、航点飞行和航向锁定都会存在一定的相似性,个人觉得如果能够多种模式结合使用就更好了,比如说兴趣点环绕(需要飞到环绕物上方设置,这一点就很不好)结合返航锁定两种,这样新手也能拍出一镜到底的画面。至于手势自拍和地形跟随用得就很少,当然最强解决方案还是Litchi这种具有细致性的规划软件,由于上期关于CrystalSky的问题还没找到解决方案我还苦恼着。
先说说PHANTOM 4 PRO+独有的轨迹飞行,在我看来它和航点飞行并没有多大区别,只是航线相对会更加直观,复杂的飞行轨迹是不能够直接绘制的,所以个人还是会倾向Litchi,它能够自动帮我实现这样的运镜:设置前方对世纪莲的俯仰角度,所有航点机头自动跟随这个角度,基本上什么样的运镜都能实现,当然设置会复杂很多。
▲最后说说智能跟随,是我用得最多的模式(仅次于三脚架模式),这个模式下的三个功能实用性很强,能够扩展实现环绕运镜,有障碍物遮挡时还会搜寻目标,目标出现时就重新跟随。 各向避障传感器的详细测试
▲软风情况下,PHANTOM 4 PRO+ V2.0自然是丝毫不动悬停 测试涉及前置、后置和两侧的传感器,下置就不进行测试了,大家也见识大疆精准悬停的能力,毕竟那是GPS/GLONASS双模定位+各种传感器+处理器内核各种堆栈技术,避障方面因为下方区域其实用得比较少,99%的情况我都是看着它降落的,另外1%那就是超视距降落导致的,传感器主要还是依赖地面纹理和环境光线,所以说带水域的地方和夜间环境是带有危险性的。
▲前置除了依赖两个双目摄像头以外,主相机也会其一定的作用,APP画面上方会有雷达扇形图显示,大概在15米的距离就能感知到障碍物并用绿色条形来表示(猜测这就是精确测距范围),当我操作它全速前进的时候(高达50 km/h),到黄色条形警告时就开始刹车,距离障碍物2.5m时刚好悬停。 从图一就可以观察到飞行器姿态修正幅度很小,掉高那是肯定的毕竟飞行速度上去了。另外窄距感知功能并没有测试,也就类似于Mavic Air的APAS技术呢,但是它会更高级直接把避障范围收窄通过,而不是选择绕行,但为了不受其他环境因素干扰,如果要执行这操作还是姿态模式最为稳妥。 对于前置避障来说,适用环境更适用于紧急情况、保证返航与航线安全,是商品航拍机的优势之一,不过要注意的是,如果是专业拍摄这种前进运镜(从加速到减速最后慢慢在障碍物面前悬停),手动稳妥的姿态模式带来的画面会更流畅。
▲后置搭载了前置相同的双目摄像头,不过细心的朋友就会发现,在最后到悬停阶段有明显的刹车姿态,个人猜测是没有主相机辅助导致的,当然有了三轴云台的支持,这一切画面都不是问题。个人认为后置避障的重要性仅次于前置,大多数场景都会涉及倒飞运镜,也会相应地减少后期工作量。
最后是大家有争议的侧面避障,大概有6到7m避障范围(应该无法精确感知),只能在三脚架和新手模式生效,首先红外线传感器的工作原理决定了避障范围,其次保证安全距离限制了飞行速度和姿态,这种侧飞运镜其实一般不需要高速移动(回想一下电影里面的画面) 若是需要高速移动也需要另外跟踪物体(那还是姿态模式干的活,云台手也要吧),当然你硬说是成本限制我没话好说,但我相信大疆技术有但并非一定要用上,也要看产品类型、实用程度、市场定位和战略吧。 两种手持起飞和降落的姿势
首先丑话说到前头,个人是真的不建议手持起飞和降落,机器和人一样都会犯错误,前者指的是飞行器发生失控的情况,皮外伤小事怕的是桨叶打到眼睛;后者指的是人因为某些原因没握好起落架,操作不当会使其失去动力和操控权,如果不慎甚至会伤到人,你敢一个人单手在狭窄的悬崖边手持起飞和降落吗?
▲双手起飞,很随意的,抓住支架两边,感受到挣脱就松手
▲双手降落,同上方式,要注意电机停止工作才松手
▲单手起飞,抓的方式要注意,形成三角形稳固支撑点,升力会产生一点晃动
▲单手降落,同上操作,单人操作需要练习多几次 所以我们还是要使用这两种方式起飞降落,那是因为地形和环境限制才会这样做,比如说凹凸不平的地面(免得刮伤和触碰云台相机),又比如说被吃瓜群众围观找不到降落点(不是更危险吗?),还有就是配合姿态模式在船上双人操作使用等等,另外单人操作时就要抓稳了,最好支撑点放在上梁和下梁区域,这样抓形成一个三角形是最稳固的,而双人操作主要还是看熟练程度罢了(比如说手刚刚抓住,电机就停止)。 不同模式的桨叶露出情况
露桨情况通常会出现在高速飞行(倾斜姿态)、向上30°仰拍的时候出现,这个问题在更高级的 INSPIRE 2身上得到完美解决,而Mavic和Phantom系列还存在此问题,下面我就大概说说拍视频和拍照哪些情况会露出桨叶,毕竟这也是要增加后期工作量的。
▲菜单里面有个镜头向上俯仰30°的解锁设置,PHANTOM 4 PRO+ V2.0大概解锁后只能在调整10°,不然就会露出桨叶,在30°的时候达到最大程度露出,受影响的可能主要还是球形全景拍摄,一般接片是没什么问题,这方面Mavic Pro要好一些,即使到30°位置露出桨叶部分也较少,不过PHANTOM 4 PRO+的视角本身要广一些只能说是相当水平吧,不同情况各有各的好处。
▲向上仰视10°的画面,其实天空画面占据已经过半部分,完全是可以一般拍照需求的。
▲在P模式下,有个小技巧,前进的时候慢慢推动油门加速,由慢到快渐进,这样姿态调整会更平缓,大概到36 km/h之后才会露出桨叶,如果是一下子加速,姿态变化太大,瞬间就会露出桨叶穿帮。另外在顺风和逆风方向表现也不一样,逆风状态下需要更大的油门来抵消力的作用前进,更容易出现桨叶。
▲S模式下,操作变得灵敏,姿态调整角度更大,响应速度也更快,所以比较难控制桨叶的露出情况,有兴趣的朋友可以练习钻研一下。 精准返航测试
其实在精准返航推出之前,我大部分是手动返航的,因为99%的情况是视距范围之内,能够最大程度节约电量,给突发情况预留空间。但自从用过Mavic Pro精准返航功能以后,体验还是不错的,想象一下若是你操纵两台无人机或者其他单反相机的时候,手根本空不出来,有些风景也许就这样错过了。精准返航的优势在于只有厘米级的偏差范围,它是通过GPS/GLONASS双模定位+下置传感器结合,通过内核计算出精准位置的,当然记得同时打开降落保护检测障碍物,这样是最为稳妥的。
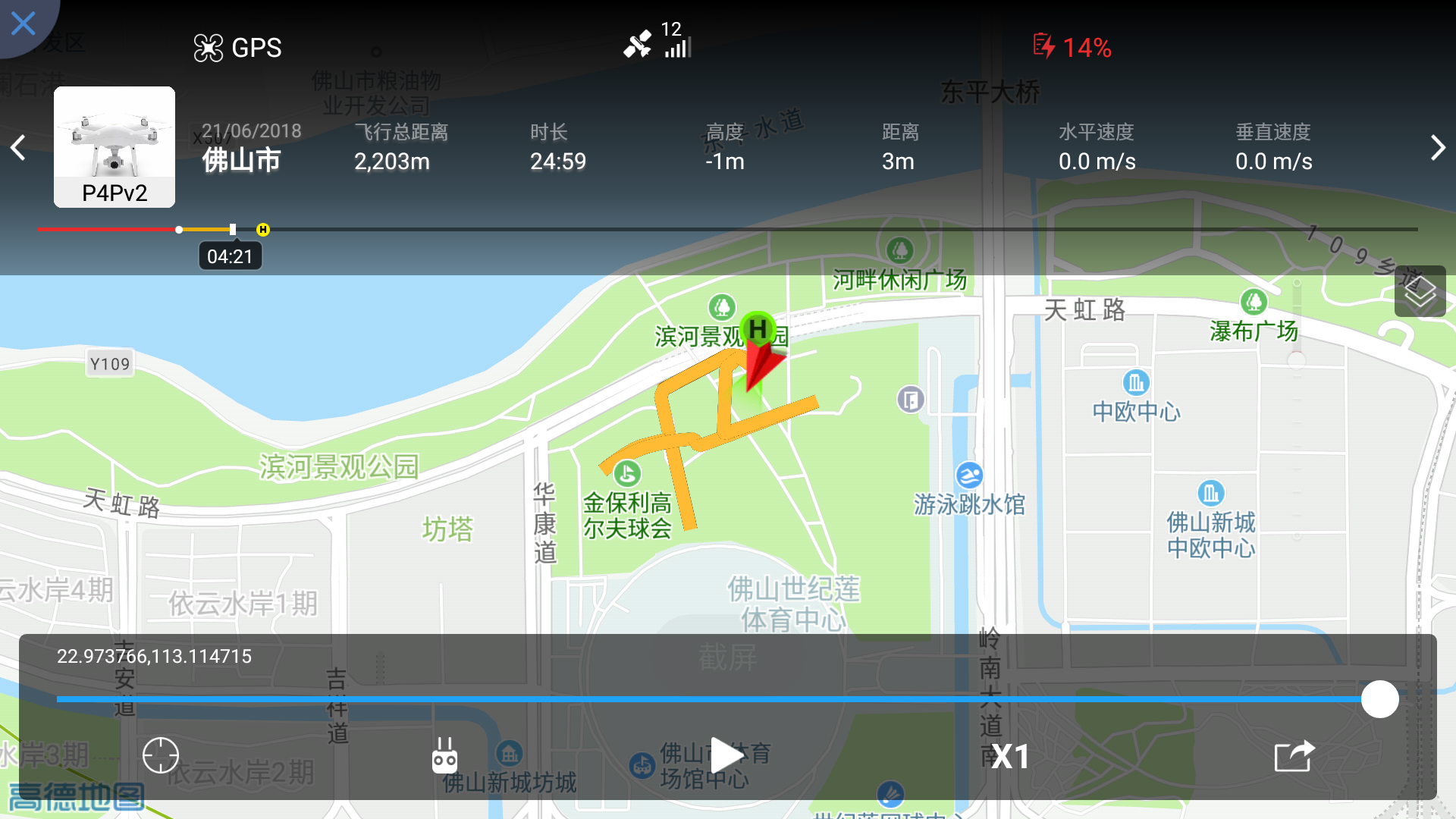
▲起飞之前的位置,记得在较低的高度悬停一会,让机器进行传感器图像检测,以便达到精准返航。
▲在未修正之前,单单依靠GPS/GLONASS双模定位还是有一定偏差的,另外可以看到开启降落保护后,降落前会进行地形检测悬停阶段。 精准返航的优势在于只有厘米级的偏差范围,它是通过GPS/GLONASS双模定位+下置传感器结合,通过内核计算出精准位置的,当然记得同时打开降落保护检测障碍物,这样是最为稳妥的,可以看到降落前后位置偏移几乎没有,这功能太强大了~ 续航时间探究
P4PV2虽然换了桨叶和电调,不过效能是没有提高的,我不习惯用大部分媒体的定点悬停来表达续航时间,毕竟正常飞行才是最为真实的体现,即便是变量因素增多,例如风力、风向等,但这就是使用者最直观的感受。
▲当天测试期间,从起飞到降落,整个过程有一段时间悬停、大部分时间在航点飞行,剩余时间都在寻找角度,最终落地剩下14%电量 (电池循环次数只有个位数),时长达到了25分钟,基本接近官方宣传的30分钟左右,平时我习惯是25%返航,预留一些电量来应付突发情况,本人不推崇拉距,这不是航拍机挑战的项目,当然新买好奇玩玩是每个人都有想法。 一些想说的话、样片和总结
关于PHANTOM 4 PRO+ V2.0的上篇和下篇评测,前前后后花了10来天时间,遗憾是没有拍到非常好看的照片,因为大部分精力都放在拍产品、测试和文字编辑上面去了,下面是我在外出测试的时候,顺便用剩余电量拍的照片,拍得不好请见谅呀,视频的话来不及拍了,如果以后有时间、有条件再拍吧,测试的项目很多可能会出现一些疏漏和错误,还请各路大神指出!
▲广州猎德大桥,雷雨后横跨珠江的彩虹桥,不算完美但尚可接受吧。
▲上图这张就是Mavic Pro拍摄,就朋友圈效果来说,差距可以说没有,主要是天气、环境和后期呀,当然仔细看还是有差别的。
▲这里就是著名的广州塔了,几乎每天晚上都会有无人机起降,经典机位就不多说了。
▲民宿楼之间的足球场,偏红色和绿色的强烈对比有木有~
▲乱入一张银河拍摄照片(顺便还看到了一颗流星坠落),地点在广州从化阿婆六村某客栈楼顶(这里就不打广告了),这是广东乃至广州观星的佳点,我喜欢暗黑系的银河,调色方面偏向真实一些。 理性来说,对于是否购买PHANTOM 4 PRO+ V2.0,第一要素那当然是资金遇算啦,毕竟同等价钱下,大家入门摄影领域的话,一台万元的全画幅相机也是不错的选择。 其次通过价钱考虑过了,剩下的相机素质和飞行性能一点毛病都没有,消费级中最强无疑,特别是升级了OcuSync图传,更新到1080P监控画面,你要考虑的是它的体积、重量罢了,我现在改变想法了,拎着它走当是健身也好~对了,你假如是买来只发朋友圈混迹一下,Mavic系列绝对是最好的选择。 感性来说,我已经失去了对售价的抵抗力,可能只会考虑一点,那就是你是否真正热爱,愿意拎着它、背着它跨过山和海,这是最重要的。 作者:中号硬核玩家 文章来源:大疆社区 立即购买 你可能也感兴趣:精灵 4 Pro V2.0 和 御 2 Pro,哪款更值得入手? 精灵 4 Pro V2.0 王者归来,回归后首度开箱测评 |





























【本文地址】